ZagHexa Robot
ZagHexa Robot Project Documentation
ZagHexa
-

Giant ZagHexa Robot
-
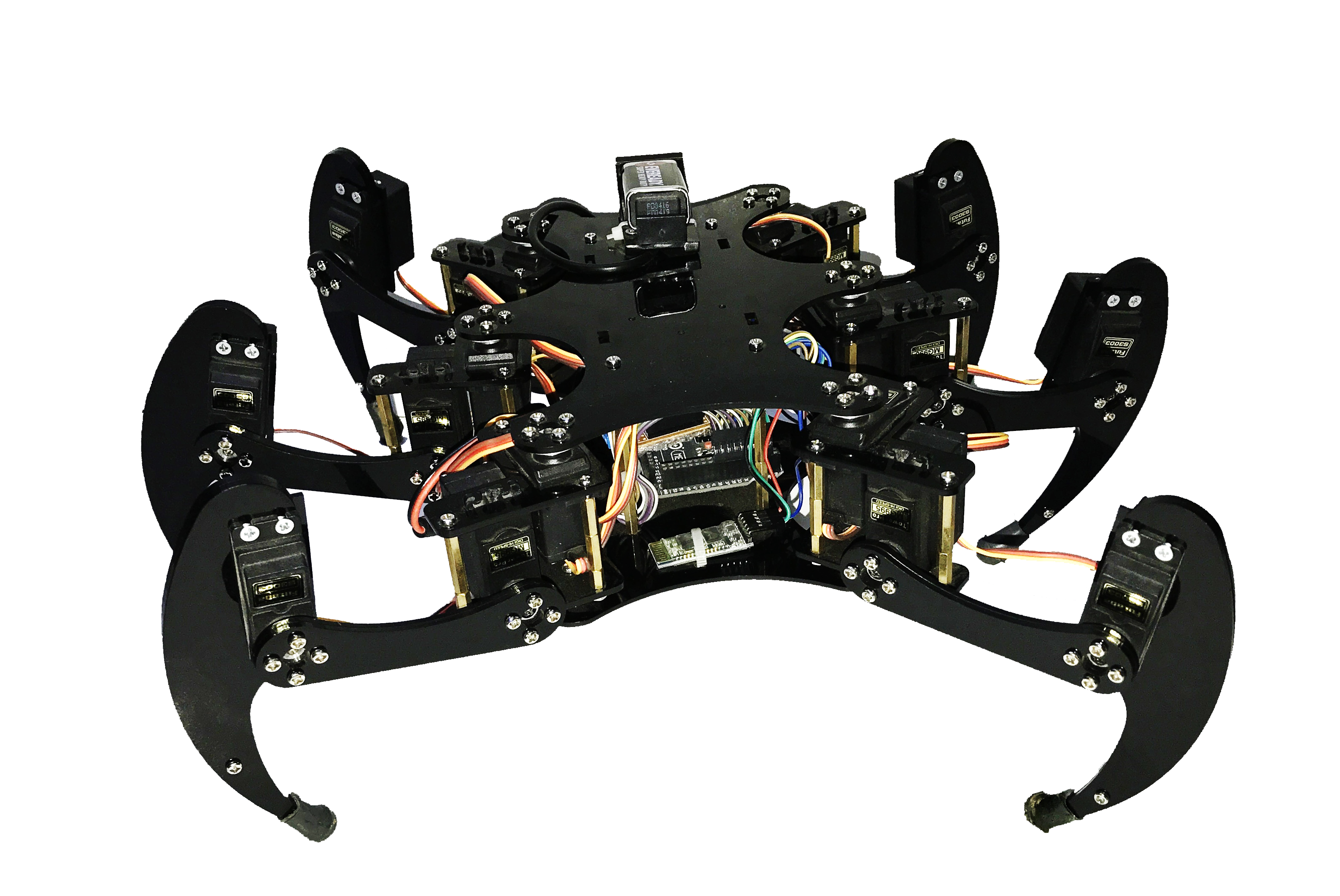
ZagHexa Robot
-
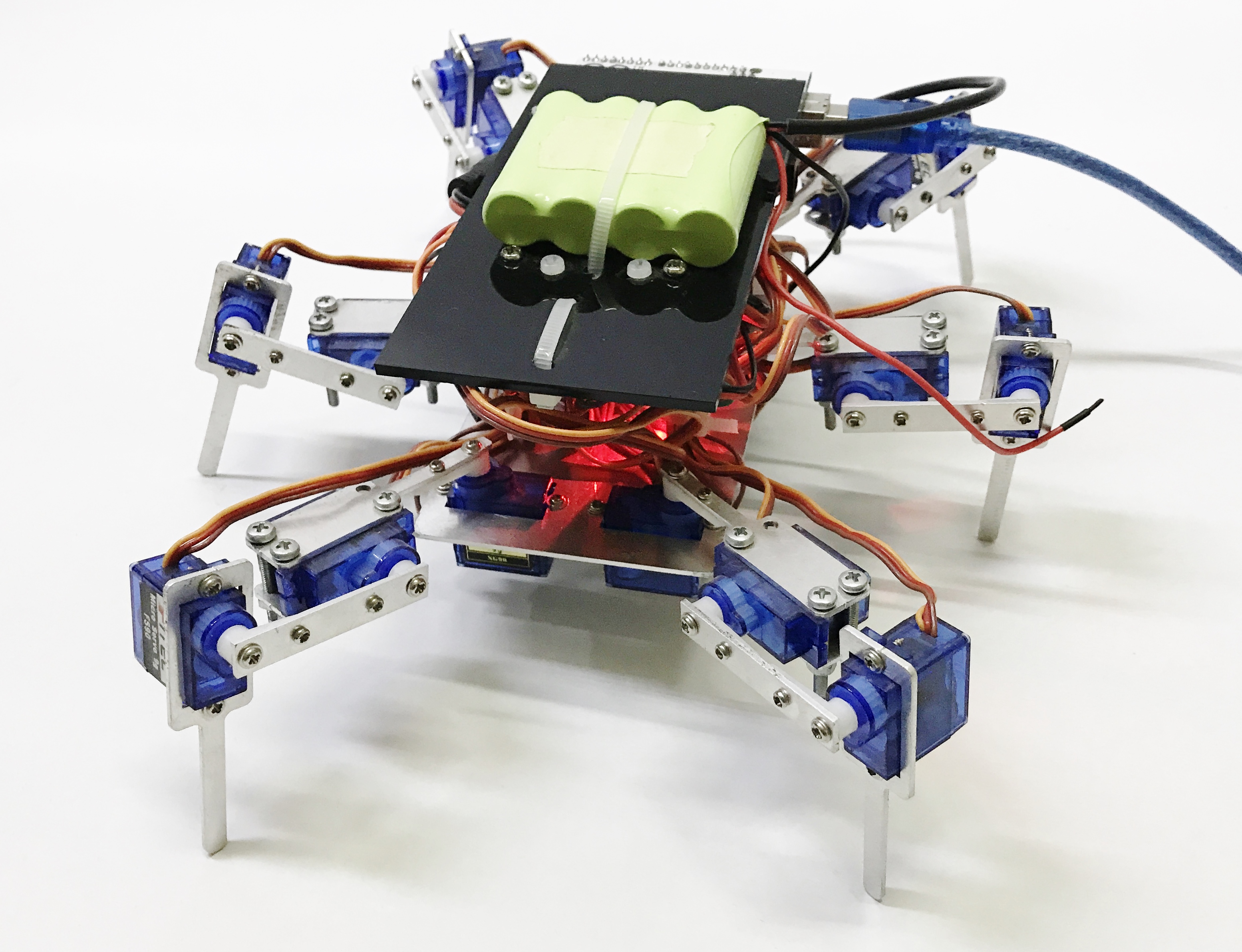
Micro ZagHexa
ZagHexa is a hexapod robot with 3DOF each leg.
It can walk in any direction "translation", turn in place "rotation", or any combination of the two.
The leg lift and the ride height is adjustable as well.
We are using 18 Servos and controlled with embedded pc and ROS "Robot Operating System" to get our robot up and running and generate the walking pattern pulses precisely.
We are using a wireless PS2 controller & mobile application to teleoperate our robot.
It can help in search and rescue operations and it can be a learning platform for teaching robotics cources, robot operating system and applying the concepts.
It partcipated in Egyptian Universities Competitions and accepted in NTRA annual graduation projects compaign.
Robot Specifications
- Number of legs: 6
- Degrees of freedom per leg: 3
- Total Degrees of freedom: 18
- Servo motion control: local closed loop
- Software Architecture: open source base on ROS